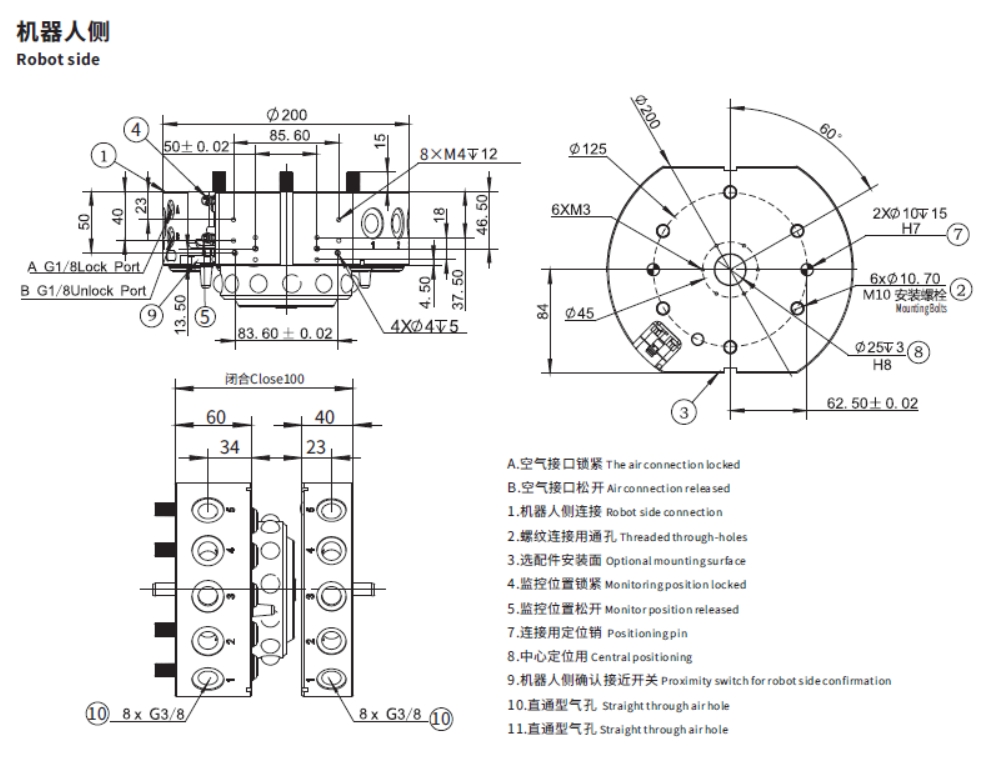
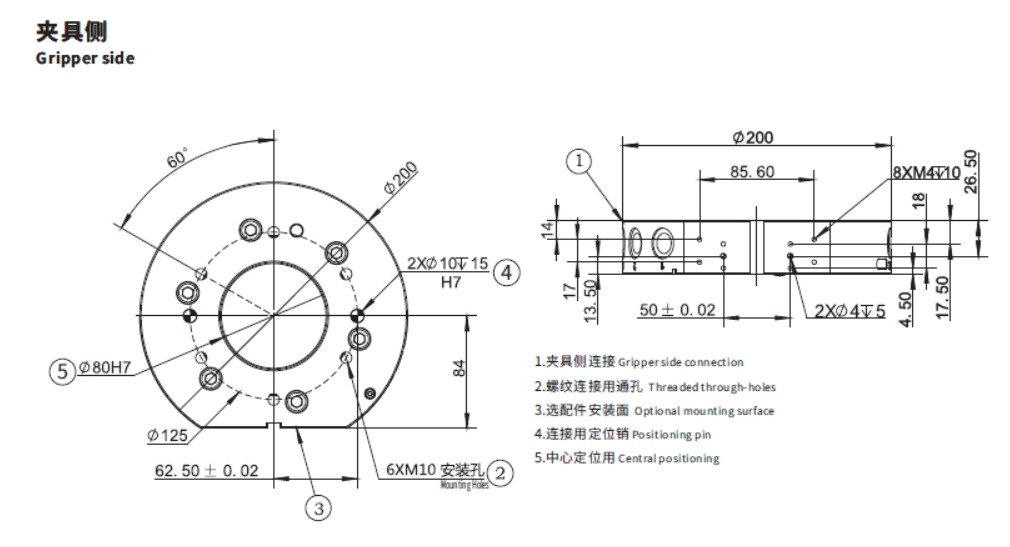
ΣΕΙΡΑ ΓΡΗΓΟΡΗΣ ΑΛΛΑΓΗΣ – QCA-200-D1 Μια συσκευή γρήγορης αλλαγής στο τέλος ενός ρομπότ


Κύρια κατηγορία
Ρομποτική Αλλαγή Εργαλείων / Αλλαγή Εργαλείων Άκρου Βραχίονα (EOAT) / Σύστημα Γρήγορης Αλλαγής / Αυτόματη Αλλαγή Εργαλείων / Ρομποτική Διεπαφή Εργαλείων / Πλευρά Ρομπότ / Πλευρά Λαβίδας / Ευελιξία Εργαλείων / Γρήγορη Απελευθέρωση / Πνευματικός Αλλαγέας Εργαλείων / Ηλεκτρικός Αλλαγέας Εργαλείων / Υδραυλικός Αλλαγής Εργαλείων / Ακριβής Αλλαγή Εργαλείων / Μηχανισμός Κλειδώματος Ασφαλείας / Τελικός Ενεργοποιητής / Αυτοματισμός / Αποδοτικότητα Αλλαγής Εργαλείων / Ανταλλαγή Εργαλείων / Βιομηχανικός Αυτοματισμός / Ρομποτική Αλλαγή Εργαλείων Άκρου Βραχίονα / Αρθρωτός Σχεδιασμός
Εφαρμογή
Η Εργαλειομηχανή End-of-Arm Tooling (EOAT) χρησιμοποιείται ευρέως σε βιομηχανίες όπως η αυτοκινητοβιομηχανία, η ηλεκτρονική 3C, η εφοδιαστική, η χύτευση με έγχυση, η συσκευασία τροφίμων και φαρμακευτικών προϊόντων και η επεξεργασία μετάλλων. Οι κύριες λειτουργίες της περιλαμβάνουν τον χειρισμό τεμαχίων εργασίας, τη συγκόλληση, τον ψεκασμό, την επιθεώρηση και την ταχεία αλλαγή εργαλείων. Η EOAT βελτιώνει σημαντικά την αποδοτικότητα της παραγωγής, την ευελιξία και την ποιότητα των προϊόντων, καθιστώντας την ουσιαστικό μέρος του σύγχρονου βιομηχανικού αυτοματισμού.
Χαρακτηριστικό
Υψηλής ακρίβειας
Η πλευρά της λαβής ρύθμισης του εμβόλου παίζει ρόλο τοποθέτησης, η οποία παρέχει υψηλή ακρίβεια επαναλαμβανόμενης τοποθέτησης. Ένα εκατομμύριο δοκιμές κύκλου δείχνουν ότι η πραγματική ακρίβεια είναι πολύ υψηλότερη από τη συνιστώμενη τιμή.
Υψηλή αντοχή
Το έμβολο ασφάλισης με μεγάλη διάμετρο κυλίνδρου έχει ισχυρή δύναμη ασφάλισης, η συσκευή γρήγορης απόληξης ρομπότ SCIC έχει ισχυρή ικανότητα αντι-ροπής. Κατά το κλείδωμα, δεν θα υπάρχει δόνηση λόγω της κίνησης υψηλής ταχύτητας, αποφεύγοντας έτσι την αστοχία ασφάλισης και εξασφαλίζοντας την επαναλαμβανόμενη ακρίβεια τοποθέτησης.
Υψηλή απόδοση
Ο μηχανισμός κλειδώματος με σχεδιασμό πολυκωνικής επιφάνειας, τα εξαρτήματα στεγανοποίησης μακράς διαρκείας και ο υψηλής ποιότητας ελαστικός αισθητήρας επαφής υιοθετούνται για να διασφαλίζουν τη στενή επαφή της μονάδας σήματος.



Παράμετρος προδιαγραφών
| Σειρά γρήγορης αλλαγής | ||||
| Μοντέλο | Μέγιστο ωφέλιμο φορτίο | Διαδρομή αερίου | Δύναμη κλειδώματος @ 80Psi (5,5Bar) | Βάρος προϊόντος |
| QCA-05 | 5 κιλά | 6-M5 | 620N | 0,4 κιλά |
| QCA-05 | 5 κιλά | 6-M5 | 620N | 0,3 κιλά |
| QCA-15 | 15 κιλά | 6-M5 | 1150Β | 0,3 κιλά |
| QCA-25 | 25 κιλά | 12-M5 | 2400Β | 1,0 κιλό |
| QCA-35 | 35 κιλά | 8-G1/8 | 2900Β | 1,4 κιλά |
| QCA-50 | 50 κιλά | 9-G1/8 | 4600N | 1,7 κιλά |
| QCA-S50 | 50 κιλά | 8-G1/8 | 5650N | 1,9 κιλά |
| QCA-100 | 100 κιλά | 7-G3/8 | 12000N | 5,2 κιλά |
| QCA-S100 | 100 κιλά | 5-G3/8 | 12000N | 3,7 κιλά |
| QCA-S150 | 150 κιλά | 8-G3/8 | 12000N | 6,2 κιλά |
| QCA-200 | 300 κιλά | 12-G3/8 | 16000N | 9,0 κιλά |
| QCA-200D1 | 300 κιλά | 8-G3/8 | 16000N | 9,0 κιλά |
| QCA-S350 | 350 κιλά | / | 31000N | 9,4 κιλά |
| QCA-S500 | 500 κιλά | / | 37800N | 23,4 κιλά |

Πλευρά ρομπότ

Πλευρά λαβής
Εφαρμοστέα ενότητα
Τύπος ενότητας
| Όνομα προϊόντος | Μοντέλο | PN | Τάση εργασίας | Λειτουργώντας ρεύμα | Σύνδεση | Σύνδεση PN |
| Μονάδα σήματος πλευράς ρομπότ | QCSM-15R2 | 7.Y00468 | 24V | 2,5Α | D-Sub15R2-1000① | 1.Y10080 |
| Μονάδα σήματος πλευράς λαβής | QCSM-15G2 | 7.Y00469 | 24V | 2,5Α | D-Sub15G2-1000① | 1.Y10081 |
| Μονάδα σήματος πλευράς ρομπότ | QCSM-08R | 7.Y00477 | 380V | 30Α | 3108A22-23S② | 1.Y10710 |
| Μονάδα σήματος πλευράς λαβής | QCSM-08G | 7.Y00478 | 380V | 30Α | 3108A22-23P② | 1.Y10711 |
| Μονάδα σήματος πλευράς ρομπότ | QCSM-19R | 7.Y00954 | 220V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Μονάδα σήματος πλευράς ρομπότ | QCSM-19R | 7.Y00954 | 220V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Μονάδα σήματος πλευράς ρομπότ | QCSM-19R1 | 7.Y02123 | 220V | 3A | MS3116F14-19S/-Y② | 1.Y11420 |
| Μονάδα σήματος πλευράς ρομπότ | QCSM-19R1 | 7.Y02123 | 220V | 3A | CMB08E-14-19S(072)SR-B② | 1.Y11863 |
| Μονάδα σήματος πλευράς λαβής | QCSM-19G | 7.Y00955 | 220V | 3A | MS3116F14-19P/-Y② | 1.Y11419 |
| Μονάδα σήματος πλευράς λαβής | QCSM-19G | 7.Y00955 | 220V | 3A | CMB08E-14-19P(072)SR-B② | 1.Y11864 |
| Μονάδα σήματος πλευράς ρομπότ | QCSM-26R | 7.Y00464 | 220V | 3A | MS3116F16-26S/-Y② | 1.Y11867 |
| Μονάδα σήματος πλευράς ρομπότ | QCSM-26R | 7.Y00464 | 220V | 3A | CMB08E-16-26S(072)SR-B② | 1.Y11865 |
| Μονάδα σήματος πλευράς λαβής | QCSM-26G | 7.Y00465 | 220V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Μονάδα σήματος πλευράς λαβής | QCSM-26G | 7.Y00465 | 220V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Μονάδα σήματος πλευράς λαβής | QCSM-21/26G | 7.Y02117 | 220V | 3A | MS3116F16-26P/-Y② | 1.Y11369 |
| Μονάδα σήματος πλευράς λαβής | QCSM-21/26G | 7.Y02117 | 220V | 3A | CMB08E-16-26P(072)SR-B② | 1.Y11866 |
| Μονάδα σήματος πλευράς ρομπότ | QCSM-32R | 7.Y02095 | 220V | 3A | MS3116F22-36S② | 1.Y13392 |
| Μονάδα σήματος πλευράς ρομπότ | QCSM-32R | 7.Y02095 | 220V | 3A | MS3118F22-36S② | 1.Y13393 |
| Μονάδα σήματος πλευράς λαβής | QCSM-32G | 7.Y02096 | 220V | 3A | MS3116F22-36P② | 1.Y13394 |
| Μονάδα σήματος πλευράς λαβής | QCSM-32G | 7.Y02096 | 220V | 3A | MS3118F22-36P② | 1.Y13395 |
①Το μήκος του καλωδίου είναι 1 μέτρο ②Μόνο σύνδεση, χωρίς καλώδιο
Πνευματική Μονάδα Επέκτασης
| Όνομα προϊόντος | Μοντέλο | PN | Διαδρομή αερίου | Τρύπα με σπείρωμα |
| Μονάδα Πνευματικής Επέκτασης Πλευράς Ρομπότ | QCAM-06G18R | 7.Y01015 | 6 | G1/8 |
| Μονάδα Πνευματικής Επέκτασης Πλευράς Λαβής | QCAM-06G18G | 7.Y01016 | 6 | G1/8 |
| Μονάδα Πνευματικής Επέκτασης Πλευράς Ρομπότ | QCAM-06G18R-E | 7.Y01018 | 6 | G1/8 |
| Μονάδα Πνευματικής Επέκτασης Πλευράς Λαβής | QCAM-06G18G-E | 7.Y01019 | 6 | G1/8 |
| Μονάδα Πνευματικής Επέκτασης Πλευράς Ρομπότ | QCAM-10M5R | 7.Y01053 | 10 | M5 |
| Μονάδα Πνευματικής Επέκτασης Πλευράς Λαβής | QCAM-10M5G | 7.Y01054 | 10 | M5 |
| Μονάδα Πνευματικής Επέκτασης Πλευράς Ρομπότ | QCAM-14M5R | 7.Y01055 | 14 | M5 |
| Μονάδα Πνευματικής Επέκτασης Πλευράς Λαβής | QCAM-14M5G | 7.Y01056 | 14 | M5 |
| Αυτοαποκαλούμενη Πνευματική Μονάδα Επέκτασης από την πλευρά του ρομπότ | QCAM-06G18R-F | 7.Y02005 | 6 | G1/8 |
| Αυτοαποκαλούμενη Πνευματική Μονάδα Επέκτασης στην πλευρά της λαβής | QCAM-06G18G-F | 7.Y02006 | 6 | G1/8 |
| Μονάδα Πνευματικής Επέκτασης Πλευράς Ρομπότ | QCAM-04G38R | 7.Y02043 | 4 | G3/8 |
| Μονάδα Πνευματικής Επέκτασης Πλευράς Λαβής | QCAM-04G38G | 7.Y02044 | 4 | G3/8 |
Τύπος μονάδας υψηλής συχνότητας
| Όνομα προϊόντος | Μοντέλο | PN | Τάση εργασίας | Λειτουργώντας ρεύμα |
| Μονάδα σήματος πλευράς ρομπότ | QCHFM-E14-C1R | 7.Y02003 | 1,4KV | 5A |
| Μονάδα σήματος πλευράς λαβής | QCHFM-E14-C1G | 7.Y02004 | 1,4KV | 5A |
Μονάδα σήματος (διεπαφή καλωδίου δικτύου)
| Όνομα προϊόντος | Μοντέλο | PN |
| Μονάδα σήματος πλευράς ρομπότ | QCSM-RJ45-06R | 7.Y02007 |
| Μονάδα σήματος πλευράς λαβής | QCSM-RJ45-06G | 7.Y02008 |
Μονάδα ισχύος σερβοκινητήρα
| Όνομα προϊόντος | Μοντέλο | PN |
| Μονάδα ισχύος σερβοκινητήρα πλευράς ρομπότ | QCSM-08R1 | 7.Y02080 |
| Μονάδα ισχύος σερβοκινητήρα πλευράς λαβής | QCSM-08G1 | 7.Y02081 |
Μονάδα σήματος σερβομηχανισμού
| Όνομα προϊόντος | Μοντέλο | PN |
| Μονάδα σήματος σερβοκινητήρα πλευράς ρομπότ | QCSM-12R | 7.Y02082 |
| Μονάδα σήματος σερβομηχανισμού πλευράς λαβίδας | QCSM-12G | 7.Y02083 |
Αυτοσφραγιζόμενη μονάδα αέρα υγρού
| Όνομα προϊόντος | Μοντέλο | PN |
| Μονάδα σήματος πλευράς ρομπότ | QCWM-02R | 7.Y02049 |
| Μονάδα σήματος πλευράς λαβής | QCWM-02G | 7.Y02050 |
Η επιχείρησή μας







